Система инерциальной навигации или inertial measurement unit в сокращении IMU. Это система которая определяет своё положение в пространстве используя свойства инерции тел. т.е. она определяет на какой угол и по какой оси она была повёрнута и была смещена относительно начальной точки. Данные системы используют датчики гироскопы, акселерометры, магнитометры, барометры в различной их комбинации, чем больше датчиков используется в системе — тем она точнее работает, т.к. у каждого датчика по отдельности есть свои недостатки.

IMU-U1
В этой статье предлагаю ознакомится с одним своим старым проектом, которому не нашел применения — модуль инерциальной навигации IMU-U1. Модуль построен на основе двух датчиков микросхем MPU9150, который включает в себя гироскоп, акселерометр, магнитометр и BMP180 — барометр. На борту установлен микроконтроллер STM32F103T8U6, который обрабатывает показания датчиков и отправляет по последовательному порту рассчитанные значения, которые может использовать контроллер более высокого ранга в системе. Так же можно заставить контролер отдавать данные не только через последовательной порт, а по Bluetooth или Wi-Fi радиоканалу. Или возложить на контроллер не только обработку показаний датчиков, но и основные вычислений, тем самым можно, например, на базе данной платы построить небольшой летательный аппарат.
Читать полностью »

Alex_EXE | 16.04.2017 | Проекты |
В копилку маломощных драйверов коллекторных двигателей L293, L298, drv8833, H-мост на полевиках, новое пополнение TB6612. Небольшая двухканальная микросхема в корпусе SSOP24 размером 7,6х8,3мм. С напряжением до 15В и током до 1,2А на канал.

Драйвер коллекторного двигателя TB6612
Читать полностью »
Alex_EXE | 27.04.2016 | Робототехника |
Давно существует и пользуются большой популярностью всем известные мезонинный контроллер Arduino и одноплатный ARM миникомпьютер RaspberryPi. Они давно полюбились сообществу, в первую очередь за свою простоту и то, что обзавелись огромной комьюнити и бесчисленным числом примеров работы с той или иной задачей и периферией. Но у них есть и недостатки: Arduino ограниченна в вычислительной мощности, а под некоторые задачи нужно что-то помощнее, а малинка ограничена в портах ввода/вывода, на ней нет АЦП и она не очень предназначена для real-time задач. А что если попробовать их объединить? Тогда они смогут компенсировать недостатки друг друга и круг охватывающих ими задач значительно расширится.

RPiDuino установленный на RaspberryPi
Именно такой задачей пару лет назад совместно с Олегом Евсигнеевым, резидентом местного ХакСпейса, мы и задались. Так на свет появился контроллер на основе Arduino, расширяющий возможности обычной RaspberryPi, которому было дано простое название RPiDuino.
Читать полностью »
Alex_EXE | 06.01.2016 | Проекты |
Был на днях в Москве и для разнообразия решил заглянуть на выставку по робототехники, которая как раз началась перед моим отбытием из столицы.
К сожалению пришёл не в самый разгар выставки, а под конец второго дня, когда стенды начали сворачивать. И толи уже всё самое интересное свернули к моему приходу, толи уже и по круче видел и уже приелось, толи всё действительно печально с робототехникой в нашей стране; в общем на 600р за входной билет она не тянула. Но всё же решил по быстрому отснять всё, что там было. Под конец дня был уставшим, поэтому вышло не очень, но если интересно то смотрите фотоотчёт под катом.
Читать полностью »
Alex_EXE | 02.12.2014 | Новости |
Всем, кто хоть немного занимался робототехникой и строил простых колёсных роботов, известны такие микросхемы, как L293, L298 , которые являются драйверами коллекторных моторов током до 300мА и 2А на канал. Микросхемы хорошие и распространённые, только им уже много лет, проще говоря – они уже устарели, вот только замену найти не так то и просто.

Драйвер коллекторного двигателя drv8833
В статье пойдёт речь о миниатюрной микросхеме 2-х канального драйвера двигателей, с максимальным током 1500 мА на канал, которая будет хорошей и достойной заменой L293 и L298.
Читать полностью »
Alex_EXE | 22.05.2014 | Робототехника |
Одним из многообещающих моих проектов был контроллер для колесных и гусеничных роботов различной конфигурации с двумя ведущими моторами малого и среднего тока, основанный на микроконтроллере PIC16F877A. Который по изначальной задумки должен был иметь драйверы двух коллекторных моторов с током до 4А, 5 универсальных аналого-цифровых входов, 8 универсальных цифровых выходов и прочею солянку. Но, к сожалению, на выбранный МК была возложена слишком большая ноша, и в середине работы над ним он перестал с ней справляться.
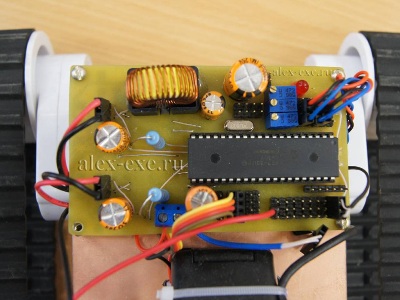
Робоконтроллер 877A
Но ничего, на ошибках учатся.
Хоть проект с этой реализацией контроллера и не удался, но был извлечен из своих ошибок важный опыт, который ляжет в основу следующей версии контроллера. И что бы этот проект не пропал почём зря, ведь что-то всё-таки реализовать получилось, – решил информацию о нём опубликовать.
Читать полностью »
Alex_EXE | 28.07.2013 | Робототехника |
В рамках проекта «говорящая рыба» на свет родился USB контроллер коллекторных двигателей на известной и распространенной микросхеме драйвере L298 с максимальным током одного канала 2А.
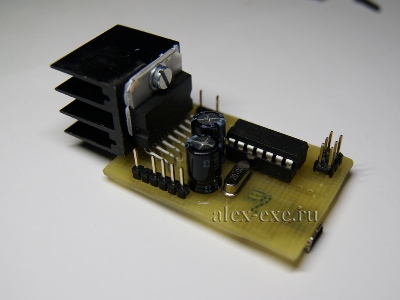
USB драйве моторов на L298N
Об этом забавном проекте, в котором применён этот контроллер, напишу позже, а сейчас речь пойдёт о самом драйвере.
Читать полностью »
Alex_EXE | 23.01.2013 | Робототехника |







